Fixing an H.264 encoding bug in the KittyCAD API
Deep underneath the abstraction layers, somewhere just above silicon lies the H.264 video codec. H.264 is so ubiquitous you can find it encoding video on Blu-ray, the streams you watch through Netflix, Hulu, YouTube, or even the broadcast HDTV stream from a nearby TV antenna. While newer, and patent-free codecs like AV1 or VP9 are being deployed and are no doubt the future of video encoding, we’ve opted to target H.264 as our video stream codec due to the widespread hardware acceleration support and compatibility.
Recently, we’ve tracked down and deployed a fix for an intermittent issue impacting Safari on OSX. We’ve been hard at work over the last few months instrumenting the stream and adding resilience to critical components, making sure the Zoo Modeling Application (ZMA) runs reliably and smoothly on our supported platforms. This latest bugfix is a bit unique as it’s buried fairly deep in the weeds of a few specific implementation details – and we figured this would be a great chance to share some of the work we’re doing within KittyCAD and what goes on behind the scenes to render your parts.
The KittyCAD Modeling API uses WebRTC in addition to the API connection during interactive modeling sessions, which facilitates the video stream between the KittyCAD API Client (such as the Zoo Modeling Application), and our Engine, which uses cloud GPUs to do the bulk of the heavy lifting when users are interactively modeling parts.
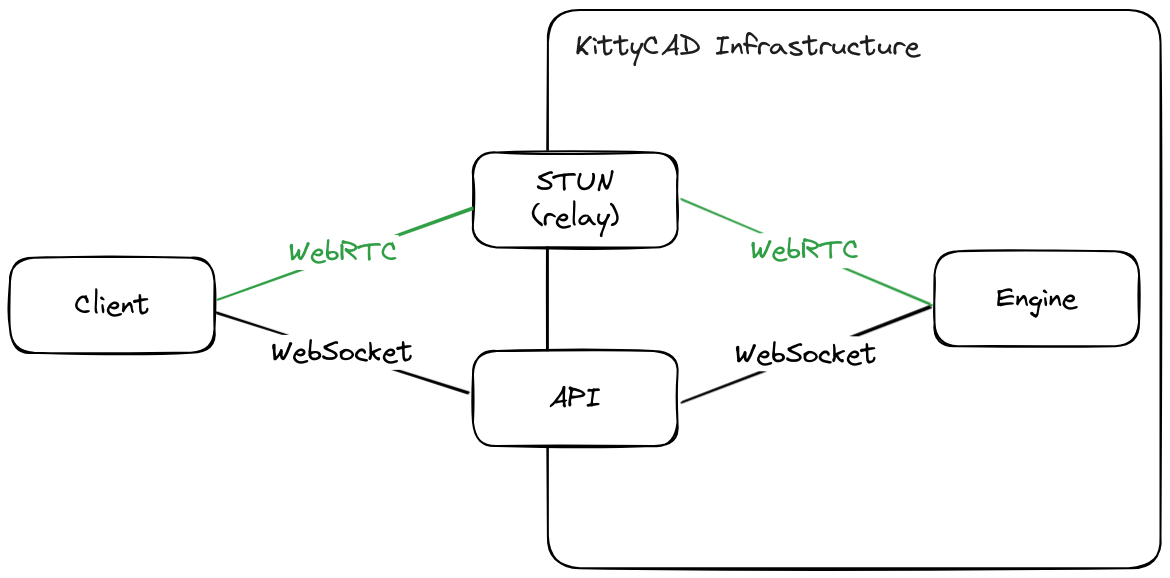
The WebRTC connection contains two streams – one Client-to-Engine unreliable data channel (unreliable being a technical term of art describing semantics regarding detecting and retrying lost data – in practice it’s fairly reliable!), which we use for real-time mouse-drag movements or other high frequency events, and one Engine-to-Client RTP media stream (an H.264 encoded video stream from the engine). We’re going to focus on just that video stream inside the WebRTC connection.
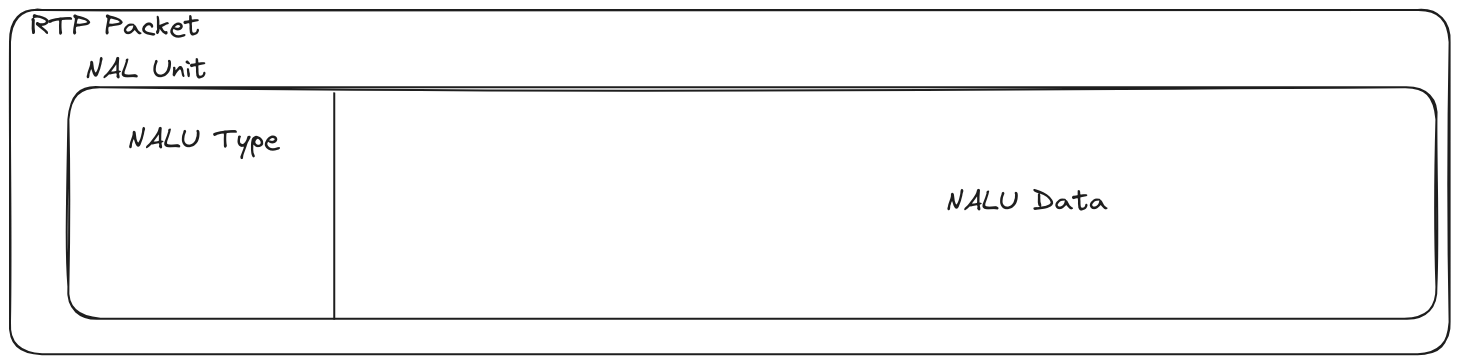
Our H.264 stream is made up of a series of messages from the encoder that listening decoders can use to render the stream back to an image on a display. Each of these messages is called a NALU, or Network Abstraction Layer (NAL) Unit. We’re using RTP, which defines the way that NALUs are sent across the network– but the gist is that each NAL unit contains a fixed length type field, followed by the type-specific unit data, not unlike other protocol encoding schemes like as OpenSSH, ASN.1 or protobuf.
H.264 encodes videos, at a high level, by sending a full image (in the form of a keyframe), then encoding changes relative to that full image for successive frames. For broadcast TV, keyframes are sent fairly frequently (every second or so) so that TVs just tuning in can display the picture quickly, but within KittyCAD’s Modeling API, we only send them as needed – we generate them on-demand when we receive an RTCP PLI (Picture Loss Indication) from the client.
We’re going to focus on four specific NALU types in this post – SPS, PPS, IDR picture, and a non-IDR picture. The first two are SPS and PPS units, which contain information about the stream itself – things like the width/height of the video, area within the stream to crop, H.264 level or profile information. They’re filled with critical metadata about the H.264 stream itself. Next is the IDR picture NALU type, which is a special type of I-Frame (full-picture frame) which contains both an I-Frame, as well as a special marker that indicates no frame after the IDR may use any frame before the IDR – think of it like a full keyframe and entry-point into the stream, and the only spot where unsynchronized decoders are guaranteed to be able to start decoding video from. All IDR frames are I-Frames, but not all I-Frames are IDR frames. Lastly, a non-IDR picture NALU is a video frame (actually, a number of different frame types, such as I-Frame, B-Frame or P-Frame) that may be coded relative to frames that came since the last IDR frame. It’s possible to have a non-IDR I-Frame, which is a full picture sent for coding optimization purposes, not synchronization purposes.
NAL-ing down the bug
With all that background in place now, let’s get into our bug when running on Safari.
Historically, KittyCAD’s Engine worked by sending the SPS, PPS and IDR NALUs when the stream starts up, and continues streaming non-IDR picture frames until the user disconnects, or until the client sends a Picture Loss Indication, requesting a new IDR keyframe – which we happily and dutifully sent along to the client. However, we kept seeing one specific failure mode in the wild, which was most likely to trigger when using Safari (or our Tauri app on OSX, which uses Safari under the hood) on initial connection to our Engine. We’d see the client send a PLI, we’d respond with a new keyframe, and the client would send another PLI. The client and the Engine would exchange keyframes and PLIs until one of the two gave up. The WebRTC metrics showed thousands of received frames, but none would ever render or be marked as decoded. After adding some additional logging, we were able to confirm that the Engine successfully encoded and sent an IDR keyframe to the client in response to the PLI when this happened.
We sat with the symptoms, understood it was non-deterministic or racy, and started to think through places where we have a single-point-of-failure during setup. Off that, on a hunch, we changed the Engine’s behavior to add the SPS and PPS NALUs when we generate the IDR NALU in response to a PLI, on the theory that Safari has somehow missed the SPS and PPS information at the beginning of the stream due to timing differences during the WebRTC handshake that don’t present as often on subsequent requests, or when using Chrome. As a result, we’ve observed a steep dropoff in instances of this bug, and it looks like the PLIs we’re receiving now go away after receiving the new keyframe. We’re still working to root-cause exactly why the SPS/PPS information is being lost with Safari, but given the non-deterministic presentation, we’re investigating races between the stream starting and the client being truly ready. In the meantime, this change is likely to fix any actual instances of this bug for our users.
 (Note the logarithmic Y axis) - our change was deployed on Oct 31, at 5PM EDT.
(Note the logarithmic Y axis) - our change was deployed on Oct 31, at 5PM EDT.
We’ll be continuing to instrument and monitor for codec related bugs like this, and use our metrics to drive and confirm bug fixes, as well as enable us to make targeted changes based on performance data as time goes on. As an example, the video codec community appears to be split on the wisdom of in-band H.264 SPS/PPS signaling vs out-of-band (for instance, sending the SPS/PPS via the WebRTC SDP over the established WebSocket). We’re opting to add this information in-band to help reduce failure modes with third-party clients and ensure the widest spread of interoperability we can, as well as trying to design around being able to dynamically change stream quality or size as the client requests it. We’re looking forward to running some experiments with our video codecs and parameter exchanges, and plan to continue to use testing cycles to determine which approaches work best for our users.
If you’ve found this bug interesting, you would fit right in at KittyCAD! Come join us, or build something great using the KittyCAD API – we’re building the future of hardware design by tackling the hardest infrastructure problems facing the industry today so hardware teams can focus on designing the next big thing – not fighting with their tools.
